




Американские инженеры из Иллинойского и Стэнфордского университетов разработали метод глубокого обучения с подкреплением, способный улучшить возможности мобильных роботов, которым приходится передвигаться и ориентироваться в помещениях с большим количеством людей. В работе, опубликованной на сайте arXiv, описывается идея использования окружающих робота людей в качестве индикаторов наличия препятствий поблизости.
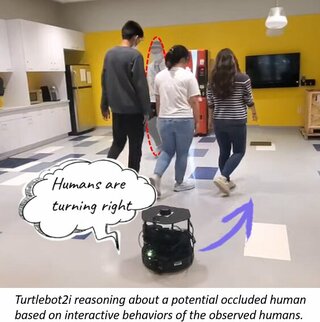
Как объясняет один из авторов работы, Маша Иткина, суть идеи заключается в том, что робот может наблюдать за поведением людей, и делать из этого выводы об окружающей действительности. Если, к примеру, мы видим, как водитель автомобиля резко затормозил, мы можем сделать вывод, что перед ним на дорогу выскочил пешеход.
Впервые идею использования людей и их поведения для оценки наличия или отсутствия препятствий описали в работе Афолаби с коллегами в 2018 году в контексте обучения робомобилей. В предыдущей работе Иткина с коллегами обобщили идею, предложив следить за несколькими водителями одновременно.
Для этого они разработали «сенсорную» модель для всех водителей, находящихся поблизости от робомобиля. Каждая из этих моделей сопоставила траекторию движения водителя с сеткой занятости окружения водителя. Впоследствии эти оценки занятости были включены в карту робомобиля с использованием методов объединения датчиков.
По словам Иткиной, в новой работе они пошли дальше, при помощи обучения с подкреплением заставив нейросеть делать выводы о наличии препятствий. И если предыдущие модели работали с людьми как с пешеходами на дороге, то новая модель разработана специально для того, чтобы использовать людей как средство для облегчения навигации в помещениях.
Поведение людей в толпе менее предсказуемо и структурируемо, чем у пешеходов. Для обучения робота учёные использовали модель глубокого обучения с подкреплением, интегрированную с латентным пространством, получаемым при помощи вариационного автокодировщика (variational autoencoder, VAE).
Как говорит Е Цзи Мунь, ведущий автор исследования, учёные успешно реализовали концепцию «людей-датчиков», чтобы расширить ограниченное восприятие робота и обеспечить навигацию в толпе с избеганием столкновений. Они продемонстрировали, что такой подход обеспечивает гораздо лучшую производительность при навигации (столкновений стало меньше, а путь робота – более плавным), чем стандартная навигация с ограниченным обзором. Результат даже сравним с навигацией в условиях полной информации обо всех объектах в помещении.
Иткина говорит, что в первую очередь они хотели воссоздать человеческую интуицию, работающую при навигации в толпах людей. Также учёных интересует, как полученные знания можно применить в других областях робототехники, от складских роботов до роботов-помощников.
Источник новости: habr.com



