




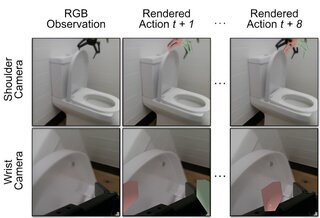
Ученые из Имперского колледжа Лондона и лаборатории Dyson Robot Learning разработали метод Render and Diffuse (R&D), который ускоряет и упрощает процесс обучения роботов новым навыкам. Этот метод, представленный в статье на сервере arXiv, использует виртуальные 3D-рендеры роботов для объединения их действий и изображений с камер.
R&D позволяет роботам «представлять» свои действия на основе изображений, что значительно снижает потребность в многочисленных демонстрациях. Это решение помогает роботам лучше справляться с задачами, требующими пространственной генерализации, и улучшает их способности к обучению в различных условиях.
Используя широко доступные 3D-модели и рендеринг, метод R&D эффективно снижает требования к объему данных для обучения. В серии симуляций и реальных экспериментов, роботы успешно выполнили такие задачи, как уборка шкафа и открытие ящиков.
 Vosylius et al
Vosylius et alИсточник новости: www.ferra.ru



