




В начале марта 2025 года состоялся релиз открытой платформы OpenBot 0.8 для самостоятельной сборки движущихся колёсных роботов на базе Arduino и под управления Android‑смартфона, включая использование встроенных в смартфон GPS, гироскопа, компаса и камеры. Исходный код проекта написан на Swift и Java и опубликован на GitHub под лицензией MIT. Предыдущая стабильная версия проекта вышла в мае 2023 года.
По информации OpenNET, программное обеспечение для управления роботом, анализа окружающего пространства и автономной навигации в OpenBot реализовано в виде приложения для платформы Android. Выполняемое на смартфоне управляющее ПО включает систему машинного обучения для распознавания объектов и выполнения функций автопилота. Робот может определять искомые объекты, объезжать препятствия, следовать за выбранным объектом и решать задачи автономной навигации. В режиме автопилота робот способен переместиться в указанное место, адаптируясь к изменениям окружения. В ручном режиме робота можно использовать как движущуюся камеру с дистанционным управлением.
Для управления двигателями, навесным оборудованием и дополнительными датчиками, а также для отслеживания заряда аккумуляторов, применяется плата Arduino Nano на базе микроконтроллера ATmega328P, которая подключается к смартфону через USB‑порт. Дополнительно поддерживается подключение датчиков скорости и ультразвукового сонара. Удалённое управление роботом может осуществляться через клиентское приложение для Android, через компьютер, находящийся в той же WiFi‑сети, через веб‑браузер или через игровой контроллер с поддержкой Bluetooth.
В версии OpenBot 0.8:
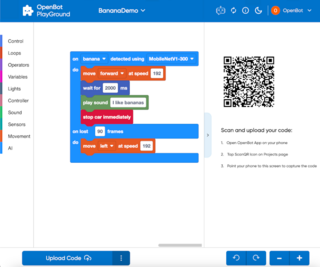
реализовано web‑приложение OpenBot Playground, позволяющее создавать программы для выполнения действий роботами. Программы определяются в виде блок‑схемы. Передача программы на используемый в роботе смартфон производится через сканирование QR‑кода;
для Android и iOS реализовано мобильное приложение Flutter Controller для дистанционного управления роботом, способное транслировать снимаемое роботом видео и передавать звук. Приложение написано с использованием фреймворка Flutter и использует WebRTC для передачи мультимедийных потоков;
добавлен запускаемый на стороне робота web‑сервер для удалённого управления;
функции отслеживания объектов адаптированы к возможности использования фронтальной камеры на смартфоне;
добавлена поддержка соединения смартфона на роботе и смартфона, используемого для дистанционного управления, через собственную сеть Wi‑Fi (на одном из смартфонов запускается точка доступа, а второй смартфон подключается к ней);
представлена облачная система OpenBot‑Fleet, предназначенная для совместного построения навигационной модели с использованием машинного обучения. Роботы передают в облако сведения о своём движении и данные с датчиков. Данные, поступающие от разных роботов, используются для тренировки модели машинного обучения. Модель затем применяется для вычисления оптимального маршрута и способности определять и обходить различные виды препятствий.
Источник новости: habr.com



